CAN & LIN Analyzer
Restbus Simulation Tool
Scope Functionality
RX / TX Automation in DLL Mode
pre-defined TX Sequences
CAN & LIN Database Support
Single Wire CAN Support
Restbus Simulation Tool
Scope Functionality
RX / TX Automation in DLL Mode
pre-defined TX Sequences
CAN & LIN Database Support
Single Wire CAN Support
CAN & LIN Analyzer
Restbus Simulation Tool
Scope Functionality (*)
RX / TX Automation in DLL Mode (*)
pre-defined TX Sequences
CAN & LIN Database Support
Single Wire CAN Support
Restbus Simulation Tool
Scope Functionality (*)
RX / TX Automation in DLL Mode (*)
pre-defined TX Sequences
CAN & LIN Database Support
Single Wire CAN Support
CAN Bus & LIN Bus Development Tools
Create user defined Output Signals
and synchronize them
with Bus Messages
Use Outputs as Trigger Signals
on Bus Messages
or Bus Message Contents
Create user defined Output Signals
and synchronize them
with Bus Messages
Use Outputs as Trigger Signals
on Bus Messages
or Bus Message Contents
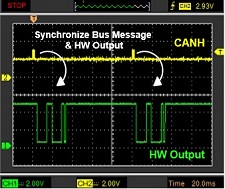
Synchronize 4 x HW Outputs with Bus Messages
WEEE-Reg.-Nr.: DE23599441
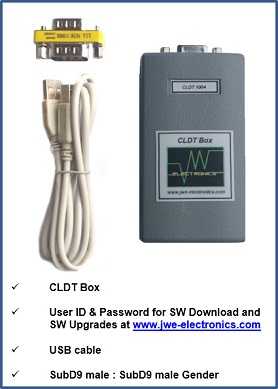
Accessories Kit
Order Information
Product Description
CAN Bus Development Tool CLDT1004 -
incl. PC Software with Upgrade Privilege for Future SW Releases
Hardware Features :
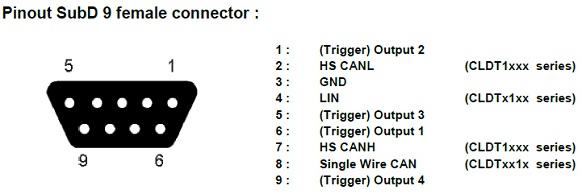
- USB PC Interface, SubD 9 CAN Bus & HW Output Interface
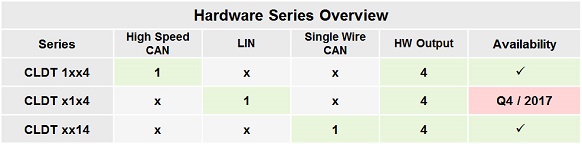
- 1 x High Speed CAN Bus up to 1 Mbit/s
- 4 x HW Output : usable as digital signal outputs or as trigger signal outputs
Easily synchronize CAN Bus Messages with physical HW Outputs
- USB PC Interface, SubD 9 CAN Bus & HW Output Interface
- 1 x High Speed CAN Bus up to 1 Mbit/s
- 4 x HW Output : usable as digital signal outputs or as trigger signal outputs
Easily synchronize CAN Bus Messages with physical HW Outputs
Software Features :
- Analyze CAN Bus Messages in Trace Mode or in Scroll Mode
- CAN Restbus Simulation with freely definable RX & TX Simulation Windows
- CAN Scope Functionality with the possibility to monitor up to 8 CAN signals in real time with a max. resolution of
1ms/div
- Various measuring, zooming and storing possibilities in Scope Mode
- create up to 8 combinable trigger events on CAN messages or on CAN message contents
- Up to 4 HW Outputs, usable as digital signal output or as trigger output
- RX / TX Automation via user definable dll. Programming language C / C++
- LCC-Win32 Compiler (free version) delivered with the CLDT Installer
- HW / SW Synchronisation in DLL Mode
- HW / SW Synchronisation in TX Sequence Mode : Possibility to program user definable TX Sequences
- CAN Data Base Support (dbc)
- Analyze CAN Bus Messages in Trace Mode or in Scroll Mode
- CAN Restbus Simulation with freely definable RX & TX Simulation Windows
- CAN Scope Functionality with the possibility to monitor up to 8 CAN signals in real time with a max. resolution of
1ms/div
- Various measuring, zooming and storing possibilities in Scope Mode
- create up to 8 combinable trigger events on CAN messages or on CAN message contents
- Up to 4 HW Outputs, usable as digital signal output or as trigger output
- RX / TX Automation via user definable dll. Programming language C / C++
- LCC-Win32 Compiler (free version) delivered with the CLDT Installer
- HW / SW Synchronisation in DLL Mode
- HW / SW Synchronisation in TX Sequence Mode : Possibility to program user definable TX Sequences
- CAN Data Base Support (dbc)
Further Information :
User Manual
,
Product Sheet
Scope of Delivery :
- CAN Development Tool CLDT 1004
- User ID & Password to Download PC SW pro Edition (Pre-Release Version) with upgrade privilege for future Software
Releases
- USB cable
- Sub-D 9 Gender / Changer
- CAN Development Tool CLDT 1004
- User ID & Password to Download PC SW pro Edition (Pre-Release Version) with upgrade privilege for future Software
Releases
- USB cable
- Sub-D 9 Gender / Changer
Detailled Information :
CAN Bus Development Tool CLDT1004 -
inkl. PC Software mit Upgrade Berechtigung für zukünftige SW Releases
Hardware Features :
- USB PC Interface, SubD 9 CAN Bus & HW Output Interface
- 1 x High Speed CAN Bus bis 1 Mbit/s
- 4 x HW Output : wahlweise verwendbar als digitale Signalausgänge oder
Triggersignal-Ausgänge
Einfache Synchronisation von Bus Messages und physikalischen HW Outputs
- USB PC Interface, SubD 9 CAN Bus & HW Output Interface
- 1 x High Speed CAN Bus bis 1 Mbit/s
- 4 x HW Output : wahlweise verwendbar als digitale Signalausgänge oder
Triggersignal-Ausgänge
Einfache Synchronisation von Bus Messages und physikalischen HW Outputs
Software Features :
- Analyse und Aufzeichnen von CAN Nachrichten im Trace Mode und Scrolling Mode
- CAN Restbus Simulation mit frei definierbaren RX und TX Simulationsfenstern
- CAN Scope Funktion mit Aufzeichnungsmöglichkeit von bis zu 8 CAN Signalen in Echtzeit, Auflösung bis zu 1 ms/div
- Vielfältige Mess-, Zoom- und Speichermöglichkeiten im Scope Modus
- Bis zu 8 konfigurierbare und kombinierbare Trigger Ereignisse auf CAN Nachrichten selbst oder auf Inhalte von
CAN Nachrichten.
- Bis zu 4 HW Outputs, nutzbar als digitale Ausgangssignale oder als Trigger-Signale
- RX / TX Automatisierung durch eine benutzereditierbare DLL. Programmiersprache C / C++
- LCC-Win32 Compiler (free version) enthalten im CLDT Installationspaket
- HW / SW Synchronisation im DLL Modus
- HW / SW Synchronisation im TX Sequence Modus : Möglichkeit vordefinierte TX Sequenzen zu programmieren
- Unterstützung von CAN Datenbanken (dbc)
- Analyse und Aufzeichnen von CAN Nachrichten im Trace Mode und Scrolling Mode
- CAN Restbus Simulation mit frei definierbaren RX und TX Simulationsfenstern
- CAN Scope Funktion mit Aufzeichnungsmöglichkeit von bis zu 8 CAN Signalen in Echtzeit, Auflösung bis zu 1 ms/div
- Vielfältige Mess-, Zoom- und Speichermöglichkeiten im Scope Modus
- Bis zu 8 konfigurierbare und kombinierbare Trigger Ereignisse auf CAN Nachrichten selbst oder auf Inhalte von
CAN Nachrichten.
- Bis zu 4 HW Outputs, nutzbar als digitale Ausgangssignale oder als Trigger-Signale
- RX / TX Automatisierung durch eine benutzereditierbare DLL. Programmiersprache C / C++
- LCC-Win32 Compiler (free version) enthalten im CLDT Installationspaket
- HW / SW Synchronisation im DLL Modus
- HW / SW Synchronisation im TX Sequence Modus : Möglichkeit vordefinierte TX Sequenzen zu programmieren
- Unterstützung von CAN Datenbanken (dbc)
Weitere Informationen :
User Manual
,
Product Sheet
Lieferumfang :
- CAN Development Tool CLDT 1004
- User ID & Passwort zum Download der PC Software pro Edition (Pre-Release Version) mit der
Downloadberechtigung für zukünftige, kostenfreie SW Upgrades
- USB Kabel
- Gender / Changer Sub-D 9pol.
- CAN Development Tool CLDT 1004
- User ID & Passwort zum Download der PC Software pro Edition (Pre-Release Version) mit der
Downloadberechtigung für zukünftige, kostenfreie SW Upgrades
- USB Kabel
- Gender / Changer Sub-D 9pol.
Detail-Informationen :











CAN Analyzer
back
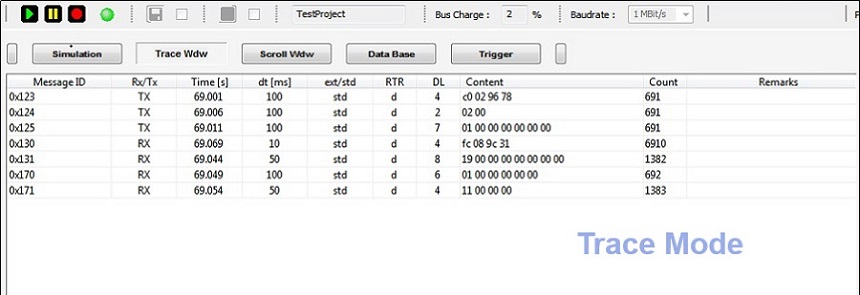
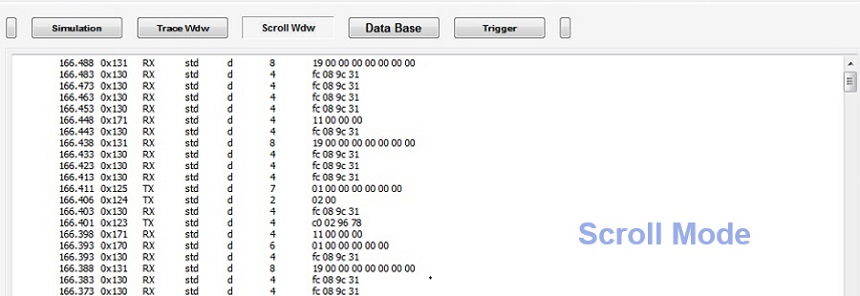
With the CLDT1004 the current data traffic on the CAN Bus can be monitored and stored in two different displaying modes : Trace Mode and Scrolling Mode.
Thereby manifold information, like bus charge, CAN ID, data length, cycle times etc., is available.
With the CLDT1004 the current data traffic on the CAN Bus can be monitored and stored in two different displaying modes : Trace Mode and Scrolling Mode.
Thereby manifold information, like bus charge, CAN ID, data length, cycle times etc., is available.
Restbus Simulation
back
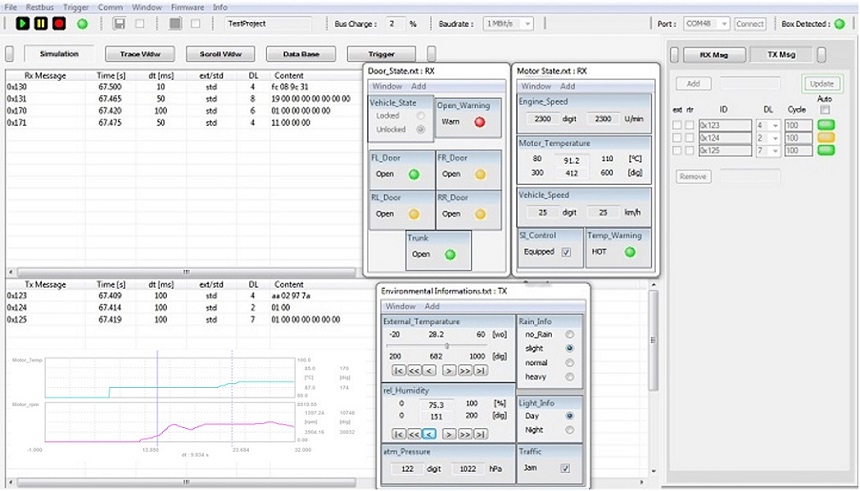
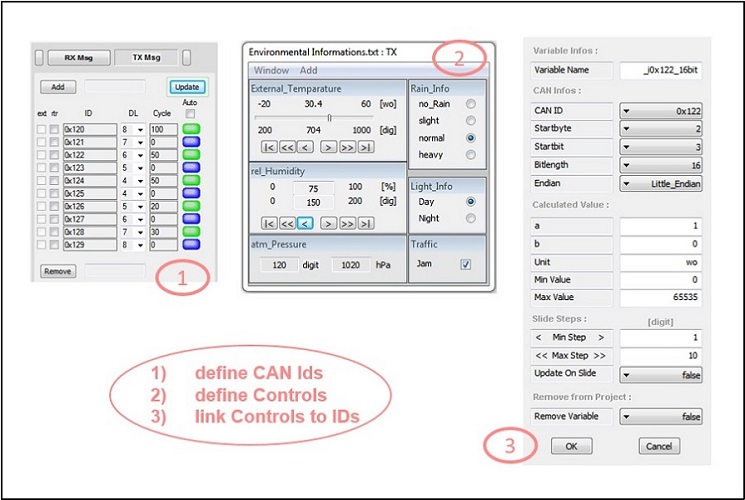
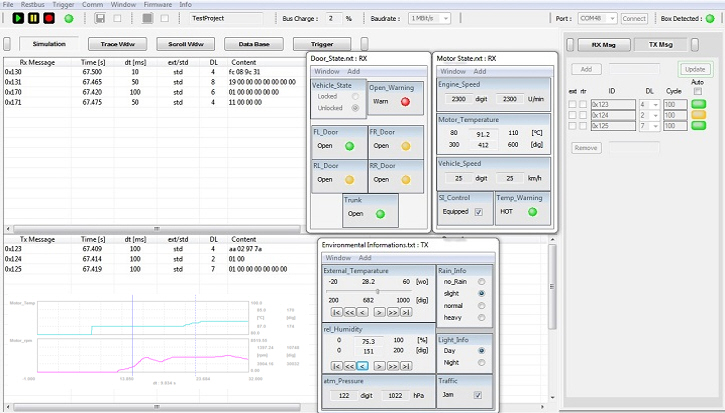
Up to 25 different CAN RX & TX IDs can be defined for restbus simulation.
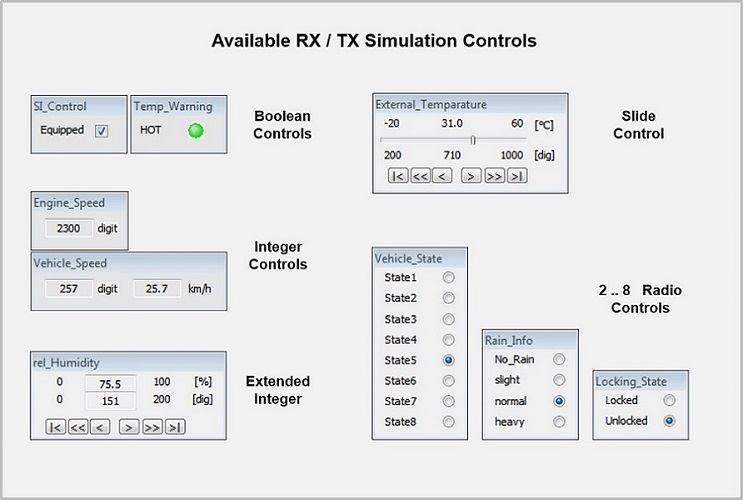
Different simulation controls are available to easily build user specific RX & TX simulation windows.
The simulation controls represent each one CAN Signal. With the Controls Properties Dialog the bit position within the pre-defined CAN ID can be assigned.
Bus data values of the defined CAN RX signals are shown in real time in the concatenated RX controls. The values for the CAN TX signals are modified by interacting the TX controls. The TX values are put in real time on the bus.
In parallel the user can manually set / reset the 4 available HW Outputs.
Up to 25 different CAN RX & TX IDs can be defined for restbus simulation.
Different simulation controls are available to easily build user specific RX & TX simulation windows.
The simulation controls represent each one CAN Signal. With the Controls Properties Dialog the bit position within the pre-defined CAN ID can be assigned.
Bus data values of the defined CAN RX signals are shown in real time in the concatenated RX controls. The values for the CAN TX signals are modified by interacting the TX controls. The TX values are put in real time on the bus.
In parallel the user can manually set / reset the 4 available HW Outputs.
CAN Scope Functionality
back
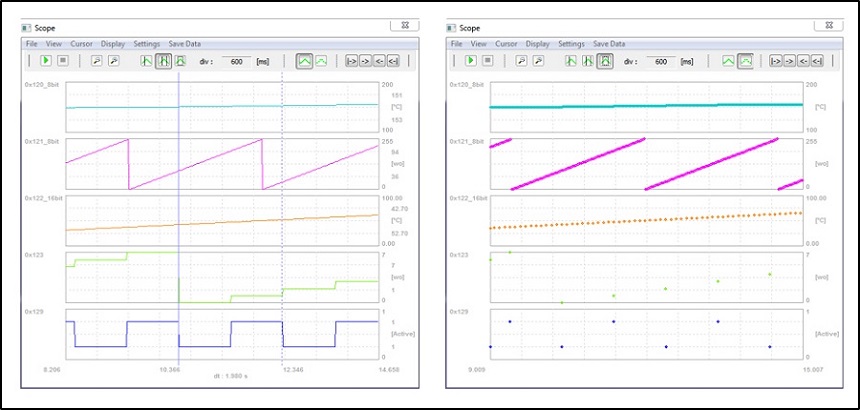
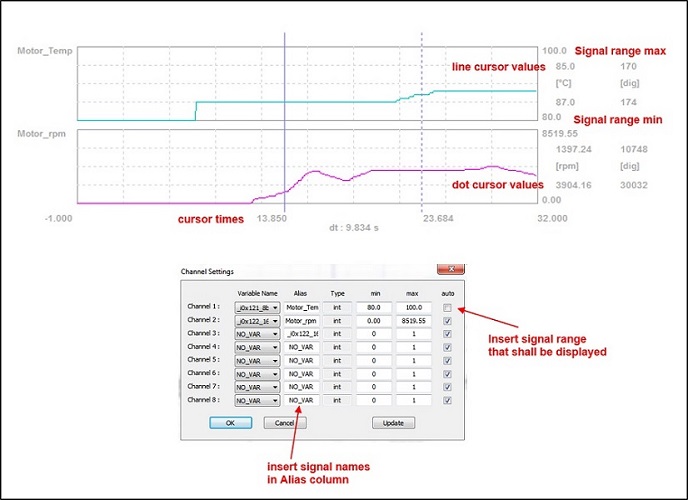
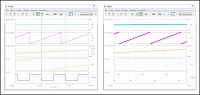
With the scope functionality up to 8 CAN signals can be monitored in real time. After restbus simulation stop the signal data is available for deeper analysis with a memory depth of 50s and a maximum resolution of 1ms. Two different displaying modes are available : Line Mode and Dot Mode.
Various zooming and measuring possibilities are disposable.
Storing in image format, as well as in data format, is integrated to offer the base for documentation and further analysis (Matlab etc.)
With the scope functionality up to 8 CAN signals can be monitored in real time. After restbus simulation stop the signal data is available for deeper analysis with a memory depth of 50s and a maximum resolution of 1ms. Two different displaying modes are available : Line Mode and Dot Mode.
Various zooming and measuring possibilities are disposable.
Storing in image format, as well as in data format, is integrated to offer the base for documentation and further analysis (Matlab etc.)
4 x HW Trigger Outputs
back
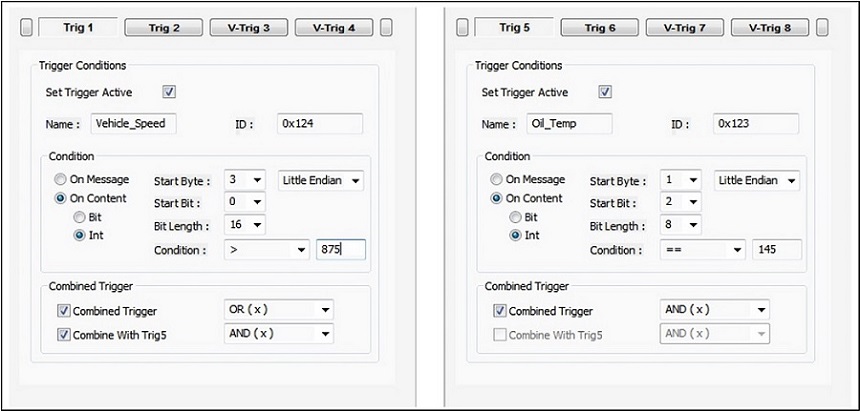
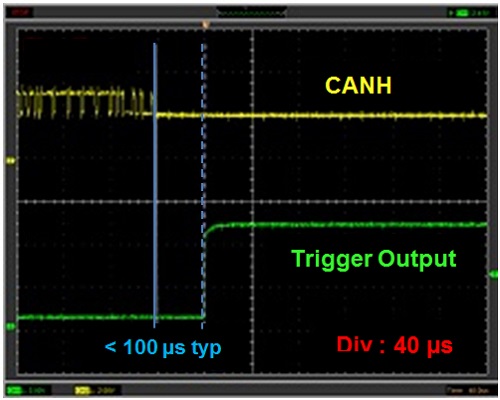
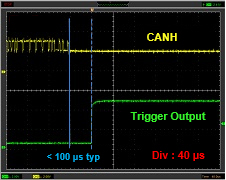
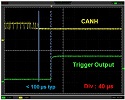
4 physical HW Outputs are available to create trigger events on bus messages or bus message contents. By monitoring the trigger outputs with an external instrument the user can react on CAN bus events in an appropriate way.
To generate trigger signals 8 user configurable trigger events can be defined. The trigger events can be combined among themselves by using logical operations in order to guarantee a high flexibility for output trigger composition.
Typical trigger reaction times are lower than 100 µs and typical rising / falling times are lower than 50 µs (if there are no additional external capacitors).
4 physical HW Outputs are available to create trigger events on bus messages or bus message contents. By monitoring the trigger outputs with an external instrument the user can react on CAN bus events in an appropriate way.
To generate trigger signals 8 user configurable trigger events can be defined. The trigger events can be combined among themselves by using logical operations in order to guarantee a high flexibility for output trigger composition.
Typical trigger reaction times are lower than 100 µs and typical rising / falling times are lower than 50 µs (if there are no additional external capacitors).
RX / TX Automation in DLL Mode
back
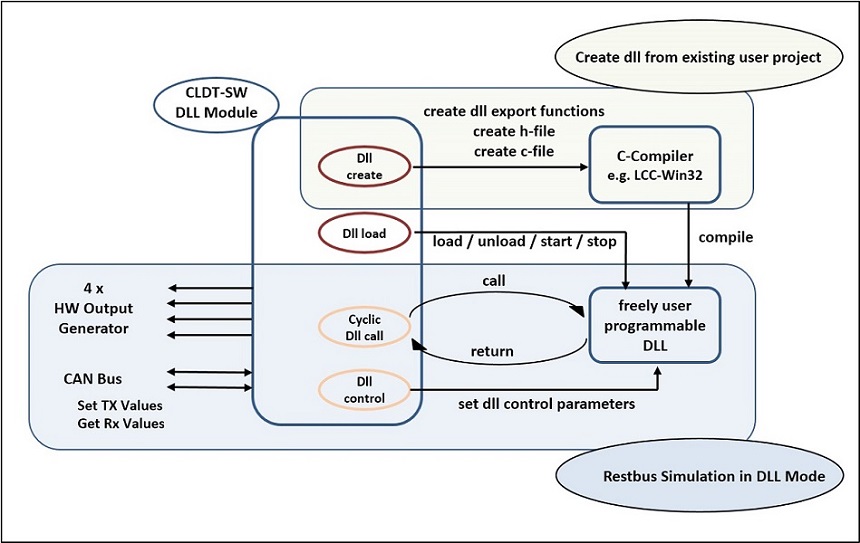
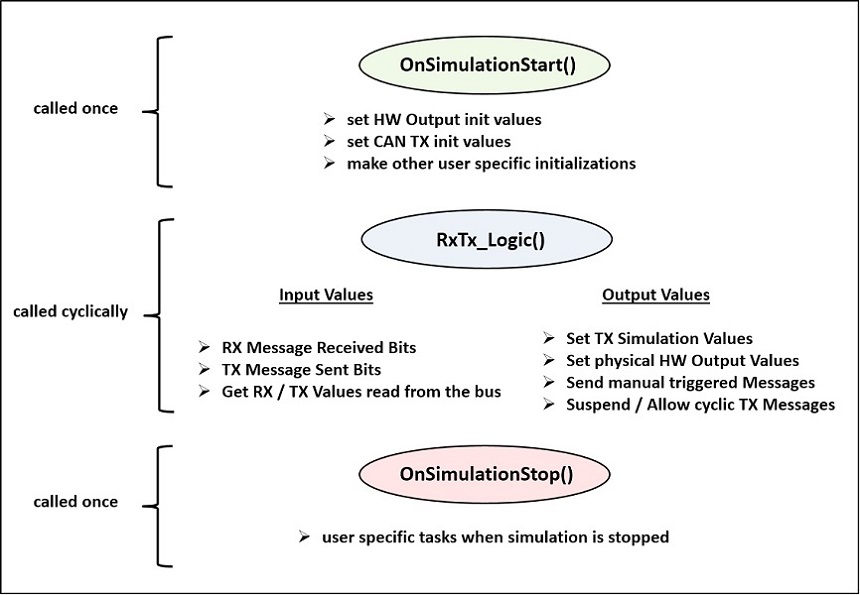
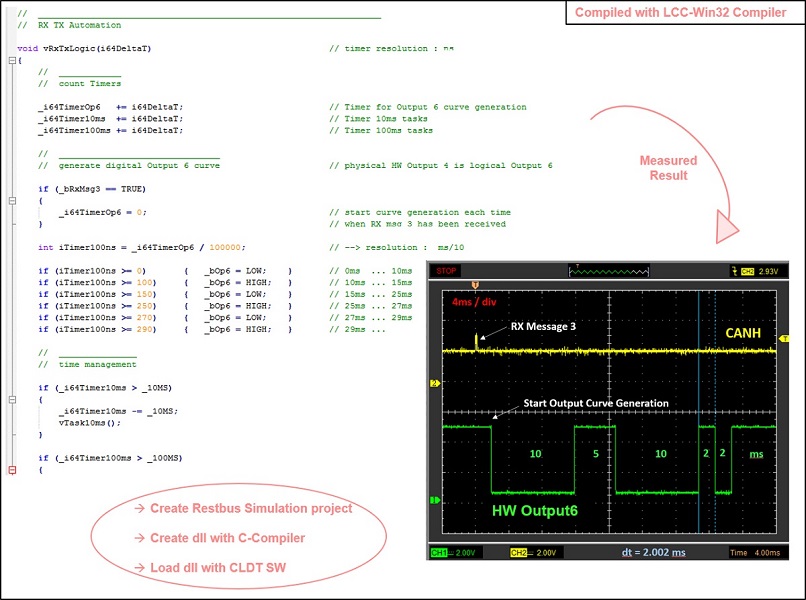
In Restbus Simulation DLL Mode the user has the possibility to program (in C or C++, depending on the used compiler) his own RX/TX functional logic. In real time CAN RX data can be read and evaluated. Afterwards the CAN TX data, as well as the 4 HW Outputs, can be set.
Therefore automatized synchronization between CAN bus signals and external hardware can be realized.
The user creates a restbus simulation project. Based on this project the skeletal structure of a DLL project is auto-created by the CLDT SW. By programming 3 pre-defined C functions the DLL can be created with the C compiler and, afterwards, be loaded by the CLDT SW.
In principle each C Compiler with the possibility to create a regular DLL can be used. Currently the CLDT SW supports actively the LCC-Win32 Compiler and the Microsoft VC++ Compiler. Future support for Borland’s C++ Builder is planned.
With the CLDT installation program the free version of the LCC-Win32 Compiler (which must not be used for commercial purpose) is delivered. Thanks a lot, Jacob !
In Restbus Simulation DLL Mode the user has the possibility to program (in C or C++, depending on the used compiler) his own RX/TX functional logic. In real time CAN RX data can be read and evaluated. Afterwards the CAN TX data, as well as the 4 HW Outputs, can be set.
Therefore automatized synchronization between CAN bus signals and external hardware can be realized.
The user creates a restbus simulation project. Based on this project the skeletal structure of a DLL project is auto-created by the CLDT SW. By programming 3 pre-defined C functions the DLL can be created with the C compiler and, afterwards, be loaded by the CLDT SW.
In principle each C Compiler with the possibility to create a regular DLL can be used. Currently the CLDT SW supports actively the LCC-Win32 Compiler and the Microsoft VC++ Compiler. Future support for Borland’s C++ Builder is planned.
With the CLDT installation program the free version of the LCC-Win32 Compiler (which must not be used for commercial purpose) is delivered. Thanks a lot, Jacob !
Pre-defined TX Sequences
back
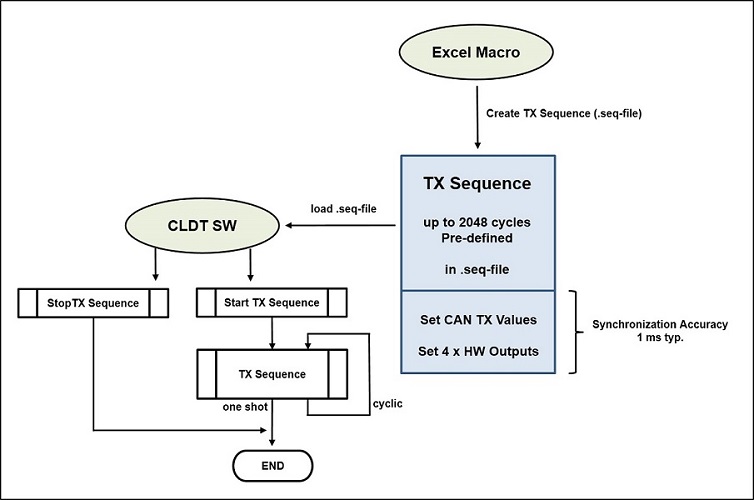
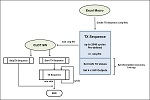
With a text editor or by use of Excel Macros a .seq-file can be created in a specific format. Afterwards the .seq-file can be loaded by the CLDT SW.
Up to 2048 different TX cycles can be generated and then be executed, cyclically or in one-shot mode, in a definable time flow.
CAN TX data, as well as the 4 HW Outputs, can be synchronized with a typical accuracy of 1ms.
With a text editor or by use of Excel Macros a .seq-file can be created in a specific format. Afterwards the .seq-file can be loaded by the CLDT SW.
Up to 2048 different TX cycles can be generated and then be executed, cyclically or in one-shot mode, in a definable time flow.
CAN TX data, as well as the 4 HW Outputs, can be synchronized with a typical accuracy of 1ms.
Data Base Support (dbc)
back
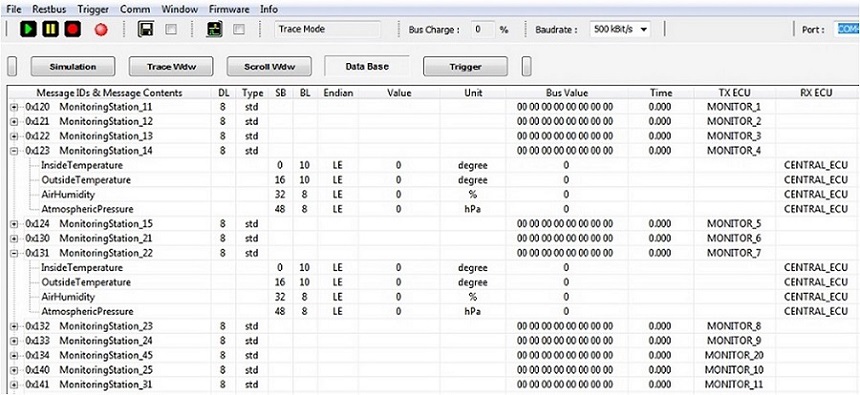
In CAN Data Base Mode the current CAN data traffic can be monitored in a Message-Signal Tree Structure. The known dbc-file format is supported by the CLDT SW.
In CAN Data Base Mode the current CAN data traffic can be monitored in a Message-Signal Tree Structure. The known dbc-file format is supported by the CLDT SW.
Aufzeichnen von CAN Nachrichten
zurück
Mit dem CLDT1004 kann der aktuelle Datenverkehr auf dem CAN Bus mit einer Baudrate von bis zu 1 MBit/s aufgezeichnet und abgespeichert werden. Zur Verfügung stehen dabei 2 Darstellungsmöglichkeiten : Trace Modus und Scrolling Modus.
Dabei werden vielfältige Informationen (wie z.B. Buslast, CAN ID, Datenlänge, Zykluszeit etc.) dargestellt
Mit dem CLDT1004 kann der aktuelle Datenverkehr auf dem CAN Bus mit einer Baudrate von bis zu 1 MBit/s aufgezeichnet und abgespeichert werden. Zur Verfügung stehen dabei 2 Darstellungsmöglichkeiten : Trace Modus und Scrolling Modus.
Dabei werden vielfältige Informationen (wie z.B. Buslast, CAN ID, Datenlänge, Zykluszeit etc.) dargestellt
Restbus Simulation
zurück
Bis zu jeweils 25 verschiedene CAN RX & TX IDs können für die Restbussimulation definiert werden.
Dem Benutzer stehen verschiedene Simulations-Kontrollelemente zur Verfügung, mit denen einfach, frei definierbare, RX & TX Simulations-Fenster aufgebaut werden können.
Die Simulations-Kontrollelemente repräsentieren dabei einzelne CAN Signale, denen über ein Eigenschaften-Dialogfeld die Bit-Position innerhalb der vordefinierten CAN IDs zugeordnet werden kann.
Die Daten der definierten CAN RX Signale werden in Echtzeit in den RX Kontrollelementen dargestellt. Die CAN TX Signale werden vom Benutzer in den entsprechenden TX Kontrollelementen geändert und in Echtzeit über den CAN Bus gesendet.
Parallel können die 4 verfügbaren physikalischen HW Outputs manuell vom Benutzer aus angesteuert werden.
Bis zu jeweils 25 verschiedene CAN RX & TX IDs können für die Restbussimulation definiert werden.
Dem Benutzer stehen verschiedene Simulations-Kontrollelemente zur Verfügung, mit denen einfach, frei definierbare, RX & TX Simulations-Fenster aufgebaut werden können.
Die Simulations-Kontrollelemente repräsentieren dabei einzelne CAN Signale, denen über ein Eigenschaften-Dialogfeld die Bit-Position innerhalb der vordefinierten CAN IDs zugeordnet werden kann.
Die Daten der definierten CAN RX Signale werden in Echtzeit in den RX Kontrollelementen dargestellt. Die CAN TX Signale werden vom Benutzer in den entsprechenden TX Kontrollelementen geändert und in Echtzeit über den CAN Bus gesendet.
Parallel können die 4 verfügbaren physikalischen HW Outputs manuell vom Benutzer aus angesteuert werden.
CAN Scope Funktion
zurück
Mit der Scope Funktion können bis zu 8 CAN Signale, die für die Restbus Simulation definiert wurden, gleichzeitig in Echtzeit beobachtet werden. Nach Simulations-Stop sind die Daten der Signale mit einer Speichertiefe von 50s bei einer Auflösung von 1ms in zwei Darstellungsweisen, dem Line Mode und dem Dot Mode, verfügbar.
Hierbei stehen dem Benutzer vielfältige Zoom- und Messmöglichkeiten zur Verfügung.
Verschiedene Speichermöglichkeiten, sowohl im Bild- als auch im Datenformat, schaffen zudem die Basis für Dokumentationszwecke oder weiterführende Analyse-Instrumente (Matlab etc.).
Mit der Scope Funktion können bis zu 8 CAN Signale, die für die Restbus Simulation definiert wurden, gleichzeitig in Echtzeit beobachtet werden. Nach Simulations-Stop sind die Daten der Signale mit einer Speichertiefe von 50s bei einer Auflösung von 1ms in zwei Darstellungsweisen, dem Line Mode und dem Dot Mode, verfügbar.
Hierbei stehen dem Benutzer vielfältige Zoom- und Messmöglichkeiten zur Verfügung.
Verschiedene Speichermöglichkeiten, sowohl im Bild- als auch im Datenformat, schaffen zudem die Basis für Dokumentationszwecke oder weiterführende Analyse-Instrumente (Matlab etc.).
4 x HW Trigger Ausgänge
zurück
4 physikalische Ausgänge stehen zur Verfügung, um Trigger Events auf CAN Bus Nachrichten, oder deren Inhalte, zu generieren. Durch Überwachung der Trigger-Ausgänge mit einem externen Gerät kann der Benutzer somit in geeigneter Weise auf auftretende Ereignisse auf dem CAN Bus reagieren.
Dabei stehen dem Benutzer zur Generierung der Trigger Events 8 vordefinierbare Trigger-Ereignisse zur Verfügung, die untereinander mit logischen Operationen verknüpft werden können.
Die typische Trigger Reaktionszeit ist dabei kleiner als 100 us bei einer Anstiegs- bzw. Abfallzeit der Ausgangssignale kleiner 50 us, falls diese nicht zusätzlich extern kapazitiv belastet werden.
4 physikalische Ausgänge stehen zur Verfügung, um Trigger Events auf CAN Bus Nachrichten, oder deren Inhalte, zu generieren. Durch Überwachung der Trigger-Ausgänge mit einem externen Gerät kann der Benutzer somit in geeigneter Weise auf auftretende Ereignisse auf dem CAN Bus reagieren.
Dabei stehen dem Benutzer zur Generierung der Trigger Events 8 vordefinierbare Trigger-Ereignisse zur Verfügung, die untereinander mit logischen Operationen verknüpft werden können.
Die typische Trigger Reaktionszeit ist dabei kleiner als 100 us bei einer Anstiegs- bzw. Abfallzeit der Ausgangssignale kleiner 50 us, falls diese nicht zusätzlich extern kapazitiv belastet werden.
RX / TX Automatisierung im DLL Modus
zurück
Im Restbus Simulation DLL Modus kann der Benutzer seine eigene RX / TX Funktionslogik programmieren (in C oder C++, je nach verwendetem C-Compiler). Dabei hat er die Möglichkeit, in Echtzeit CAN RX Daten zu lesen, diese programmtechnisch zu verarbeiten und anschließend CAN TX Daten, sowie die 4 HW Ausgänge zu setzen.
Eine automatisierte Synchronisation von CAN Bus Signalen und externer Hardware wird dadurch ermöglicht.
Der Benutzer erstellt mit der CLDT SW ein Restbus Simulations-Projekt. Ausgehend von diesem Projekt wird automatisch das Grundgerüst für eine DLL von der CLDT SW erstellt. Durch die Programmierung von 3 vordefinierten C-Funktionen und die anschließende Compilierung wird die DLL erstellt, die mit der CLDT SW geladen werden kann.
Prinzipiell kann zur Erstellung der DLL jeder C-Compiler, der eine reguläre DLL erstellen kann, verwendet werden. Aktiv unterstützt werden aktuell von der CLDT SW der LCC-Win32 Compiler und der VC++ Compiler von Microsoft. Ein Support für den C++ Builder von Borland ist für die Zukunft geplant.
Mit dem Installationsprogramm wird die frei erhältliche Version des LCC-Win32 Compiler ausgeliefert, der für nicht kommerzielle Zwecke verwendet werden darf. Vielen Dank hierfür an Jacob !
Im Restbus Simulation DLL Modus kann der Benutzer seine eigene RX / TX Funktionslogik programmieren (in C oder C++, je nach verwendetem C-Compiler). Dabei hat er die Möglichkeit, in Echtzeit CAN RX Daten zu lesen, diese programmtechnisch zu verarbeiten und anschließend CAN TX Daten, sowie die 4 HW Ausgänge zu setzen.
Eine automatisierte Synchronisation von CAN Bus Signalen und externer Hardware wird dadurch ermöglicht.
Der Benutzer erstellt mit der CLDT SW ein Restbus Simulations-Projekt. Ausgehend von diesem Projekt wird automatisch das Grundgerüst für eine DLL von der CLDT SW erstellt. Durch die Programmierung von 3 vordefinierten C-Funktionen und die anschließende Compilierung wird die DLL erstellt, die mit der CLDT SW geladen werden kann.
Prinzipiell kann zur Erstellung der DLL jeder C-Compiler, der eine reguläre DLL erstellen kann, verwendet werden. Aktiv unterstützt werden aktuell von der CLDT SW der LCC-Win32 Compiler und der VC++ Compiler von Microsoft. Ein Support für den C++ Builder von Borland ist für die Zukunft geplant.
Mit dem Installationsprogramm wird die frei erhältliche Version des LCC-Win32 Compiler ausgeliefert, der für nicht kommerzielle Zwecke verwendet werden darf. Vielen Dank hierfür an Jacob !
Vordefinierte TX Sequenzen
zurück
Der Benutzer kann mit einem Texteditor oder über die Verwendung von Excel Makros eine .seq-Datei mit einem vordefinierten Format erzeugen und diese mit der CLDT SW laden.
In der .seq-Datei können bis zu 2048 verschiedene TX Zyklen definiert werden, die anschließend in einem zeitlich vorgebbaren Ablauf ausgeführt werden können.
Dabei können CAN TX Daten, sowie die 4 HW Ausgänge, mit einer Synchronisations-Genauigkeit von 1ms, aufeinander abgestimmt werden.
Die TX Sequenzen können zyklisch oder im "Einmal"-Modus ausgeführt werden.
Der Benutzer kann mit einem Texteditor oder über die Verwendung von Excel Makros eine .seq-Datei mit einem vordefinierten Format erzeugen und diese mit der CLDT SW laden.
In der .seq-Datei können bis zu 2048 verschiedene TX Zyklen definiert werden, die anschließend in einem zeitlich vorgebbaren Ablauf ausgeführt werden können.
Dabei können CAN TX Daten, sowie die 4 HW Ausgänge, mit einer Synchronisations-Genauigkeit von 1ms, aufeinander abgestimmt werden.
Die TX Sequenzen können zyklisch oder im "Einmal"-Modus ausgeführt werden.
Unterstützung von CAN Datenbanken (dbc)
zurück
Im Datenbasis Modus kann der aktuelle Datenverkehr auf dem CAN Bus mit einer Baudrate von bis zu 1 MBit/s aufgezeichnet und abgespeichert werden. Die Darstellung der CAN Nachrichten und CAN Signale erfolgt hierbei in einer Nachrichten-Signal Baum-Struktur.
Das bekannte dbc-File Format wird hierbei unterstützt.
Im Datenbasis Modus kann der aktuelle Datenverkehr auf dem CAN Bus mit einer Baudrate von bis zu 1 MBit/s aufgezeichnet und abgespeichert werden. Die Darstellung der CAN Nachrichten und CAN Signale erfolgt hierbei in einer Nachrichten-Signal Baum-Struktur.
Das bekannte dbc-File Format wird hierbei unterstützt.